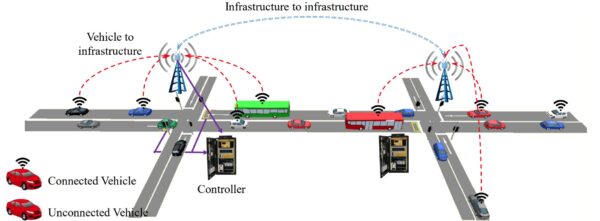
Our research utilizes the capabilities offered by connectivity and automation technologies, the internet of things (IoT), and traffic sensors to model and analyze cooperative traffic control systems. We develop distributed optimization and coordination algorithms that can utilize high-resolution real-time data to attain near-optimal solutions to the cooperative traffic systems in real-time. We incorporate our developed algorithms into high-fidelity traffic simulators to study their effects on urban network congestion more accurately. We have developed distributed control algorithms for the following domains in traffic engineering:
1. Cooperative Connected Automated Vehicle Control in Transportation Facilities – read more . . .
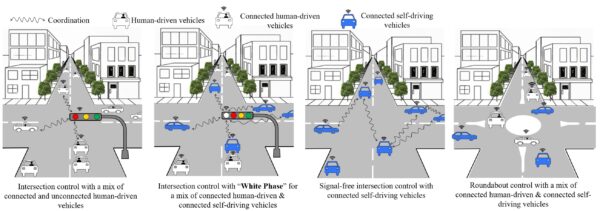
2. Traffic Light Signal Timing Optimization – read more . . .