Connected automated vehicles (CAVs) are expected to bring significant changes to how we travel and how traffic control devices operate. One can think that traffic lights may become obsolete and can be removed from intersections when all vehicles are connected and automated. How about when only some vehicles are automated, how about pedestrians and bicyclists, how about disruptions in communications?
Some changes in traffic lights may be necessary to accommodate this transition period from no to all automated vehicles in the traffic stream. It may not be easy to make a change in a technology that has been around for more than 100 years. Let us think about how existing traffic lights work: they stop all conflicting movements except for one to avoid a collision, then stop that movement to allow another one to travel. As a result of this concept, the green time is switched between movements. This transition of green time from one movement to the next requires yellow and red signals, which lead to some lost time in each cycle.
White phase: Mobile Traffic Controller Paradigm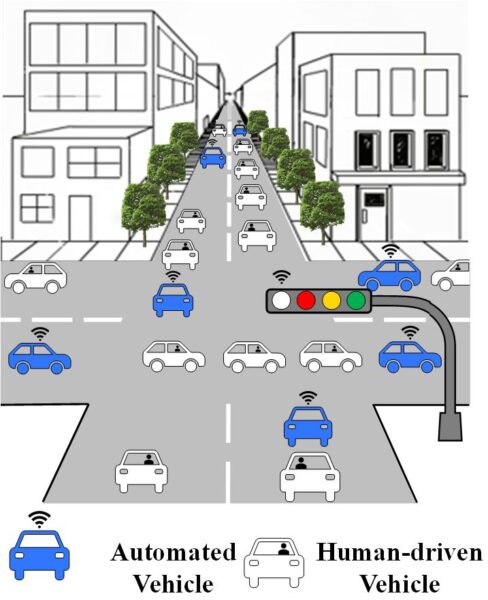
We are working on a new traffic control paradigm: using automated vehicles as mobile traffic controllers in cooperation with the traffic signal controller. Therefore, automated vehicles can create groups of human-driven vehicles, negotiate the right of way with each other, and navigate human-driven vehicles through the intersection during a new phase called the white phase. This happens only when enough automated vehicles are present in the intersection neighborhood, otherwise, typical green, yellow, and red phases are used. Our simulation analysis has been very promising and the new paradigm resulted in total delay reductions ranging from 7% to 96% when the automated vehicle market penetration rate increases from 10% up to 100%.
Here are some of our publications on this topic:
- Niroumand R.*, M. Tajalli*, L. Hajibabai, and A. Hajbabaie, 2020. Joint Optimization of Vehicle-group Trajectory and Signal Timing: A New Phase for a Mixed-autonomy Traffic Stream. Transportation Research Part C: Emerging Technologies, Vol. 116:102659.
- Niroumand R.*, L. Hajibabai, and A. Hajbabaie. The Effects of the “White Phase” on Intersection Performance with Mixed-Autonomy Traffic Stream. The IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), September 2020.
Trajectory Control in Roundabouts
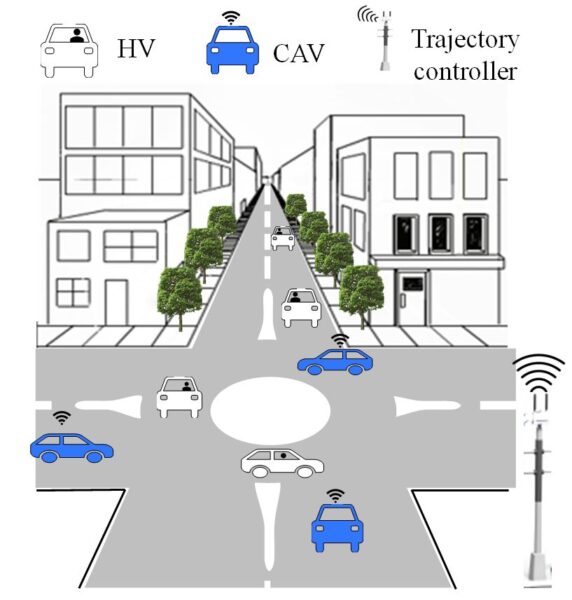 There are more than 7,000 roundabouts in the US (according to Kittleson and Associates). Navigating an automated vehicle through a roundabout is safer than through an intersection; however, it is much more challenging from both operations and control perspectives. Merge and diverge movements are present in roundabouts and vehicles travel around a circle. We have developed a methodology to control the trajectory of CAVs in single-lane roundabouts in a mixed traffic stream of human-driven and automated vehicles. We formulated an optimization program in a two-dimensional space for this purpose and developed a model predictive control-based solution technique to optimize the trajectories of CAVs at discretized time steps based on the estimated driving behavior of HVs. our simulation results show that even a low market penetration rate of CAVs can translate to significant improvement in traffic operations, safety, and rider comfort in single-lane roundabouts. We observed up to 36% reduction in travel time, up to 98% reduction in travel delay, and a significant increase in the roundabout capacity.
There are more than 7,000 roundabouts in the US (according to Kittleson and Associates). Navigating an automated vehicle through a roundabout is safer than through an intersection; however, it is much more challenging from both operations and control perspectives. Merge and diverge movements are present in roundabouts and vehicles travel around a circle. We have developed a methodology to control the trajectory of CAVs in single-lane roundabouts in a mixed traffic stream of human-driven and automated vehicles. We formulated an optimization program in a two-dimensional space for this purpose and developed a model predictive control-based solution technique to optimize the trajectories of CAVs at discretized time steps based on the estimated driving behavior of HVs. our simulation results show that even a low market penetration rate of CAVs can translate to significant improvement in traffic operations, safety, and rider comfort in single-lane roundabouts. We observed up to 36% reduction in travel time, up to 98% reduction in travel delay, and a significant increase in the roundabout capacity.
Here are some of our publications on this topic:
- Mohebifard R.* and A. Hajbabaie, 2021. Trajectory Control in Roundabouts with a Mixed-fleet of Automated and Human-driven Vehicles. Computer-Aided Civil and Infrastructure Engineering, Submitted.
- Mohebifard R.* and A. Hajbabaie. Effects of Automated Vehicles on Traffic Operations at Roundabouts. The IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), September 2020.
Signal-Free Intersection Control
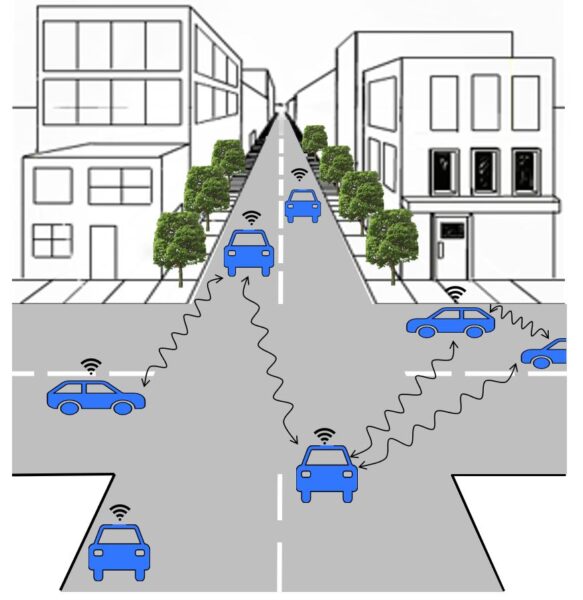
Signal Free Intersection
In the distant future, when all vehicles are connected and automated, traffic lights may be removed. CAVs can either negotiate the right of way with each other and proceed through the intersection, or communicate with a central controller that assigns safe trajectories to each CAV. The main assumption here is that there is no pedestrian present and CAVs are cooperative. We have developed a consensus-based distributed methodology, where each CAV shares its planned trajectory with other CAVs and makes adjustments in its own trajectory based on input from others until all CAVs reach a consensus on how to proceed. We also designed a central controller to find safe trajectories and shares them with all CAVs. Our simulation results show significant improvements in traffic operations: travel delay was reduced by up to 70%. We also observed that each intersection lane could process at least 1,500 vehicle per hour per lane, which is significantly more than the typical capacity of a through lane at a signalized intersection.
Here are some of our publications on this topic:
- Mirheli A., M. Tajalli*, L. Hajibabai, and A. Hajbabaie, 2019. A Consensus-based Distributed Trajectory Control in a Signal-free Intersection. Transportation Research Part C: Emerging Technologies, Vol. 100, pp 161-176.
- Mirheli A., L. Hajibabai, and A. Hajbabaie, 2018. Development of a Signal-head-free Intersection Control Logic in a Fully Connected and Autonomous Vehicle Environment. Transportation Research Part C: Emerging Technologies, Vol. 92, pp 412-425.Signal Timing and Speed Control for CAVs
Signal Timing and Speed Control for Connected Automated Vehicles
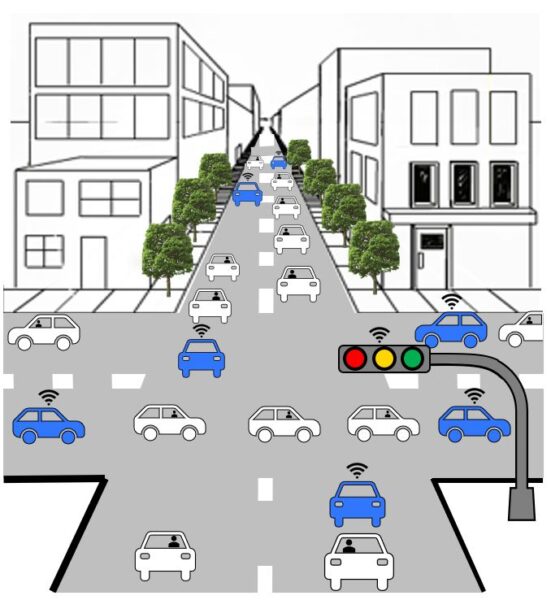 CAVs can communicate with the intersection traffic light controller. They can share their location, speed, and estimated arrival time based on which, the signal controller adjusts the signal timing parameters. Besides, CAVs can adjust their own speed and consequently arrival time based on the signal timing information received from the signal controller. We have developed methodologies that utilize these capabilities to improve traffic operations in urban street networks. These methodologies assume that signal controllers and CAVs cooperate with each other and aim to improve system-level traffic operations rather than reducing a single CAV’s travel time. We have developed a microscopic methodology that can update the location of a CAV every 0.1 to 0.2 seconds and thus, is suitable for controlling a single intersection. We have also developed methodologies that are suitable to control an urban street network and are based on macroscopic traffic flow fundamentals.
CAVs can communicate with the intersection traffic light controller. They can share their location, speed, and estimated arrival time based on which, the signal controller adjusts the signal timing parameters. Besides, CAVs can adjust their own speed and consequently arrival time based on the signal timing information received from the signal controller. We have developed methodologies that utilize these capabilities to improve traffic operations in urban street networks. These methodologies assume that signal controllers and CAVs cooperate with each other and aim to improve system-level traffic operations rather than reducing a single CAV’s travel time. We have developed a microscopic methodology that can update the location of a CAV every 0.1 to 0.2 seconds and thus, is suitable for controlling a single intersection. We have also developed methodologies that are suitable to control an urban street network and are based on macroscopic traffic flow fundamentals.
Here are some of our publications on this topic:
- Tajalli M.* and A. Hajbabaie, 2021. A Lagrangian-based Signal Timing and Trajectory Optimization in a Mix Traffic Stream of Connected Self-driving and Human-driven Vehicles. IEEE Transactions on Intelligent Transportation Systems, Submitted.
- Tajalli M.*, M. Mehrabipour*, and A. Hajbabaie, 2020. Cooperative Signal Timing and Speed Optimization in Connected Urban-Street Networks. IEEE Transactions on Intelligent Transportation Systems, In Press.
- Tajalli M.* and A. Hajbabaie, 2018. Distributed Optimization and Coordination Algorithms for Dynamic Speed Harmonization in Connected Urban Street Networks. Transportation Research Part C: Emerging Technologies, Vol. 95, pp 497-515.
- Tajalli M.* and A. Hajbabaie, 2018. Dynamic Speed Harmonization in Connected Urban Street Networks. Computer-Aided Civil and Infrastructural Engineering, Vol. 33, pp 510-523.